

人形机器人焦点转向“手”:本田瞄准工厂最难自动化工序
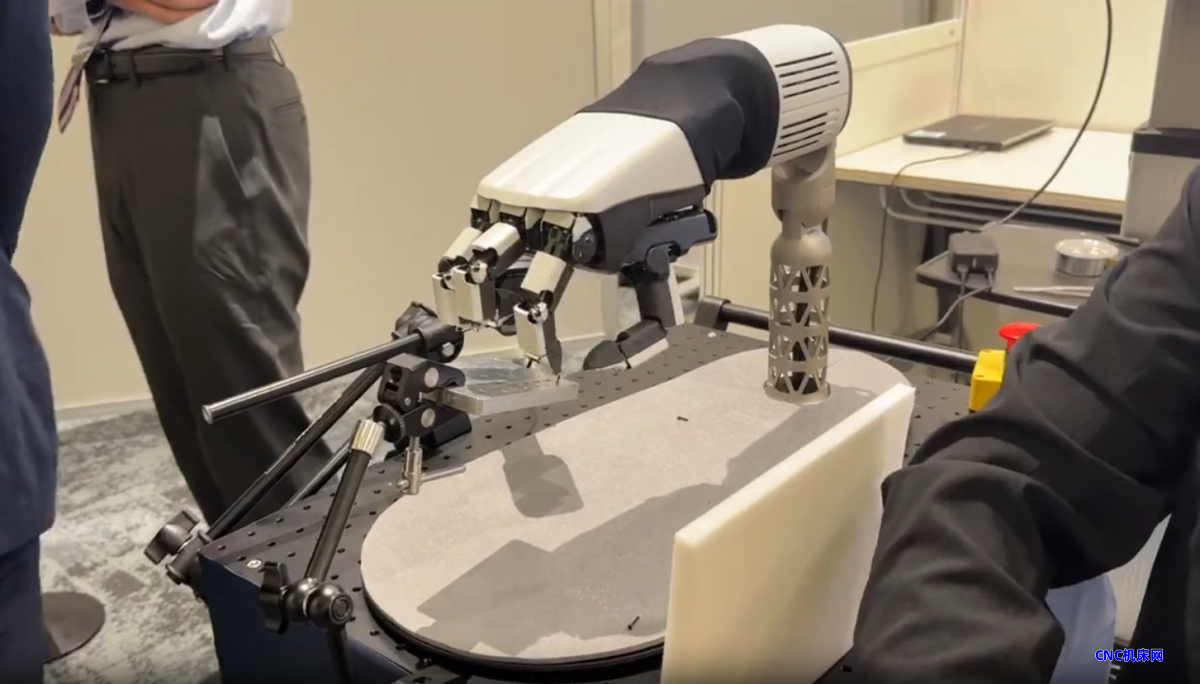
在全球人形机器人热潮中,日本本田选择了一条更接近产业落地的路线:不是先让机器人“像人一样走路”,而是先让机器人“像人一样干活”。 近日,本田公开了新型多指机械手。这款机械手尺寸接近成人手部,拥有 16自由度 驱动关节,指尖配备 6轴力觉传感器,手指和手掌部分合计搭载 288通道触觉传感器。 其最大连续指尖力为 50N,约相当于5kgf。实际可操作重量仍取决于工件形状、夹持姿态和表面摩擦等条件,但这一指标已显示出其处理一定重量工件的潜力。 这并非单纯用于展示的机械手,而是本田试图进入工厂真实工序的关键部件。 |
在ASIMO时代,本田曾以双足行走机器人震动全球。如今,当美国、中国等市场重新掀起人形机器人竞赛时,本田并没有急于回到“双足行走”的舞台中心,而是把重点放在了“手”上。
对正在推进柔性自动化和具身智能布局的中国制造业来说,本田这一路线的意义不在于“机器人外形”,而在于它把竞争焦点重新拉回了工序、末端执行器和触觉数据。
背后的逻辑很清楚: Physical AI(物理AI)真正进入制造现场,最后绕不开的不是“会不会走路”,而是“能不能可靠地接触、抓取、旋转、插入和装配”。 |
工厂不缺“会走路”的机器人,缺的是“会干活”的手
过去两年,全球人形机器人产业快速升温。美国和中国企业不断展示能够行走、搬运、进入仓库或工厂的人形机器人。资本市场也将其视为AI进入物理世界的重要入口。
但从制造现场来看,双足行走未必是最先需要解决的问题。
在工厂里,机器人跌倒可能带来设备损坏和安全风险;生产线空间有限,既有设备、传送带、安全围栏和人员动线都高度固定。机器人是否能像人一样走路,当然具有技术意义,但真正决定其能否进入生产线的,是它能不能稳定完成具体作业。
本田看到的正是这一点。 汽车工厂中仍有大量依赖人工的环节。例如抓取不同形状的零件、调整零件方向、拧紧小型螺丝、推动柔软的线束、在狭小空间中插入连接器。 这些工作看似普通,却是传统工业机器人长期难以完全替代的部分。 |
传统工业机器人擅长的是确定性任务:固定零件、固定位置、固定轨迹、固定节拍。一旦零件姿态发生变化,材料具有柔性,或者作业需要微妙的力控制,自动化难度就会显著上升。
因此,本田新型多指机械手真正面对的竞争对手,并不一定是特斯拉或中国的人形机器人整机企业,而是传统夹爪、专用治具、协作机器人末端执行器,以及制造现场中仍由人工完成的细碎工序。
机器人手难在物理世界:接触、摩擦和耐久性
多指机械手之所以长期难以产业化,原因并不只是“控制算法不够聪明”。
OpenAI曾经将强化学习应用于五指机器人手,并展示过单手操作魔方的研究成果。该项目的核心是通过大规模仿真训练,再把控制策略迁移到真实机器人手上。这个案例曾被视为AI控制机器人手的重要突破。但随后,OpenAI的机器人研究团队被报道解散,公司重心转向生成式AI等软件领域。
这一过程说明了一个问题:机器人手不是单靠AI模型就能解决的课题。
• 指尖会打滑 • 零件会倾斜 • 线束会弯曲 • 螺丝会卡住 • 连接器可能只偏移几毫米就无法插入 |
手的动作本质上是连续接触。此类接触现象很难在仿真环境中完全复现。
硬件结构也存在长期矛盾。如果把电机放在手掌或手指内部,结构直观,但电机必须小型化,输出力和耐久性容易受限。若把电机放在前臂,通过线缆驱动手指,则可以让手指更轻、输出更强,但会带来摩擦、延迟、磨损和控制滞后。
机器人手必须同时满足三个条件: • 足够灵巧 • 足够有力 • 足够耐用 |
这正是过去多指机械手难以走出实验室的重要原因。
本田独自驱动方式,试图解决“力与灵巧”的矛盾
本田新型多指机械手的技术核心,是采访中提到的独自驱动方式“Willow Drive”。这一名称带有“像柳树一样柔韧而有力”的含义。
传统线缆驱动结构中,电机输出到指尖的过程中容易产生摩擦和动作损失。结果是,控制指令发出后,指尖响应出现延迟;想做细微力控制时,动作不够平滑;长期重复使用后,线缆磨损也会成为可靠性问题。
Willow Drive的目标,就是降低传动过程中的损失,使机械手在保持较高输出力的同时,仍能实现平滑、细腻的手指动作。
本田展示的动作包括操作M1.6级别小螺丝、穿针、使用工具等。这些演示看似“炫技”,但对制造业来说意义很直接。
它们对应的是工厂中最难自动化的部分: • 多品种零件拣选 • 线束连接 • 狭小空间装配 • 柔性部件处理 • 微小零件操作 |
这些环节并不一定需要整台人形机器人,但确实需要一只足够接近人手能力的机械手。
本田选择现实路线:先攻克特定工序,再谈通用机器人
本田当前的思路,并不是立刻推出一台能完成所有家务和工厂作业的通用机器人。更现实的路径,是先在对象明确、工序边界清楚的制造现场中积累应用经验。
目前,本田尚未明确公布这款多指机械手的外部销售计划。更有可能的导入路径,是先在自有工厂或特定生产工序中验证其可行性,判断哪些作业真正适合使用多指机械手替代人工。
从系统形态来看,它也未必需要安装在双足人形机器人身上。更现实的方案,可能是安装在现有工业机器人手臂末端,或部署在移动平台、上半身机器人单元上。相比让机器人在工厂中双足行走,这种方式更容易与现有设备、安全规范和生产线布局结合。
这也是本田路线与当前人形机器人热潮之间的差异。 很多人形机器人企业强调“通用形态”,希望机器人在未来进入人类生活和工作空间。本田则更强调从可验证的工程场景切入。 对于制造业来说,后者可能没有前者那么吸引眼球,却更接近真正的商业落地。 |
Physical AI的关键数据,可能来自“触觉”
生成式AI能够快速发展,一个重要原因是互联网上已有大量文本、图像和视频数据。但机器人要在现实世界中操作物体,需要的数据远比文本和图像复杂。
尤其缺乏的是触觉数据。
摄像头可以告诉机器人,一个红色零件在桌子右侧。但摄像头很难直接判断这个零件是否容易打滑、表面是否柔软、需要多大的力才能插入、什么时候会发生偏移。人类在操作零件时,会依靠指尖触感不断调整力量和角度,而机器人要获得这种能力,就必须采集和学习触觉数据。
本田新型多指机械手的价值在于: 它不仅能执行动作,还能通过力觉和触觉传感器记录接触状态。 未来,如果这些数据与VLA(Vision-Language-Action,视觉-语言-动作)模型结合,就可能让机器人逐步学习“如何抓”“用多大力”“什么时候需要调整姿态”。 |
这也是本田相对AI公司的差异所在。
AI企业拥有强大的模型能力,但未必拥有足够多的真实制造现场数据。机器人创业公司可以制造整机,但不一定拥有大量复杂工序。本田作为汽车制造商,本身拥有工厂、生产线、质量管理体系和大量真实装配场景。
换句话说,本田不仅在开发一只机械手,也可能在为Physical AI积累现实世界的操作数据。
机械手本身,并不能直接改变工厂
当然,机械手性能再高,也不意味着工厂自动化会立刻大规模改写。
真正进入生产线,需要的不只是机械手本体。它还必须与机器人手臂、视觉识别系统、治具、搬送装置、安全系统、工程设计和维护体系结合。生产现场还会关注导入成本、维护成本、停机风险、换线时间,以及一线操作人员是否容易使用。
多指机械手越复杂,价格和保养难度也可能越高。
因此,本田这款机械手更应被看作一个关键模块,而不是完整答案。 未来真正的评价标准,不是它在展台上能完成多少高难度动作,而是它能否在实际工序中稳定运行,并证明其投资回报率。 |
对于中国制造业企业来说,这一点尤其值得关注。
中国工厂在自动化方面已经积累了大量经验,但大量长尾工序仍依赖人工。尤其是在汽车零部件、电子装配、线束加工、精密部件组装等领域,柔性作业仍是自动化短板。多指机械手如果能在这些环节实现稳定应用,将直接改变末端执行器、协作机器人和柔性自动化方案的竞争格局。
日本企业的机会,不在“更像人”,而在“更懂工序”
在人形机器人产业中,中国企业的优势在于供应链、成本控制和量产速度;美国企业的优势在于AI模型、资本和软件生态。日本企业若想重新取得存在感,不能只靠展示“像人一样”的机器人。
更现实的机会在于工程现场。
本田这款多指机械手的意义,就在于它把焦点从“机器人是否像人”转向“机器人能否替代人的关键动作”。 这一路线不追求一开始就做万能机器人,而是从工厂中最难自动化、但需求真实存在的工序切入。 |
ASIMO时代,本田让世界看到机器人可以像人一样行走。进入Physical AI时代,本田试图回答另一个问题:机器人能否像人一样操作真实物体。
未来竞争的关键,可能不在于谁的机器人走得更稳、跑得更快,而在于谁能更快进入真实工程,积累触觉数据,降低导入成本,并把复杂动作变成可复制的自动化单元。
本田押注“手”,并不是放弃人形机器人,而是选择了一条更接近制造现场的路线。
真正的问题是: 本田能否把这只“手”尽快放进实际生产线,并在量产现场积累足够多的数据和应用经验。 对于Physical AI来说,实验室里的演示只是起点,工厂里的持续运行才是分水岭。 |





