首先介绍了反向式丝杠副的应用场景和种类,列举了目前几种主流反向式行星滚柱丝杠副和滚珠丝杠副的结构与作用原理;然后,分别介绍了两种丝杠副目前在承载性能和传动效率的研究现状和主要成果,并分析其不足;最后,根据其在人形机器人直线关节的性能需求,从结构设计与模型分析、性能与试验装备以及加工工艺三部分提出未来发展展望。
 PART 1
PART 1
序言
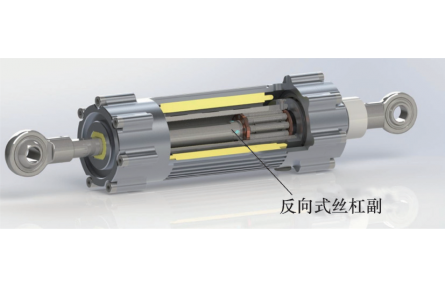
随着国防科技和军工装备的发展,航空航天、船舶等领域对高品质加工和优异传动性能的伺服传动机构需求不断增加[1]。其中,反向式丝杠副因其长螺母短丝杠的特殊结构,常作为人形机器人直线关节的重要传动部件,人形机器人直线关节及反向式丝杠副如图1所示。作为人形机器人的“机械肢”,直线关节被要求拥有高精度、高可靠性和高动态响应特性等性能,因此,用户对反式丝杠副的结构设计和性能要求也不断提高,需做到高承载、高刚性、高重复定位精度、高精度保持性和高传动效率等。
图1 人形机器人直线关节及反向式丝杠副
反向式丝杠副是一种可以将旋转运动转化为直线运动的机械传动装置,不同于标准式丝杠,反向式丝杠副具有长螺母的特殊结构特征,通过螺母旋转运动转化为丝杠直线运动,便于集成电动机,优化直线执行器的空间[2],常作为直线运动的执行机构,被广泛应用于航空航天、军工装备、机器人、机床及医疗器械等领域[3]。
反向式丝杠副国外起步早,技术相对成熟,其产品精度高、承载强、动态特性好且可靠性好,广泛应用于航空航天、半导体和高端装备领域。国内近两年发展迅速,精度可达P3级,传动效率超80%,但传动效率较国外略低[4],寿命长,已经突破了大长径比螺纹磨削的核心工艺难题,但高端产品在精度保持性与寿命方面仍与国外存在差距,超高精度级别的批量一致性与稳定性仍是攻关重点,发展现状呈现出技术快速突破与产业化进程加速的鲜明特点。在技术层面,行星滚柱丝杠副的精度已能做到微米级,承载能力与耐冲击性远超传统滚珠丝杠,特别适用于高可靠性的苛刻环境[5]。滚珠丝杠副在效率与精度保持性上持续优化,中高端产品已能满足绝大部分工业场景的需求。
随着人形机器人直线关节的需求不断增加,国内对于反式丝杠副的需求和性能要求也不断提升。因此,需要加强对反向式丝杠副的研究力度、改良现有工艺,实现性能提升,提高产品市场竞争力。目前,针对滚珠和滚柱两种结构的反向式丝杠副,都需要优化齿形设计,提高承载能力和传动效率,实现人形机器人直线关节以及其他直线作动器领域的高承载、高刚性、高重复定位精度和高精度保持性的性能要求。
 PART 2
PART 2
反向式丝杠副产品种类及发展现状
2.1 反向式行星滚柱丝杠副
反向式行星滚柱丝杠副最早由瑞典人STRANDGREN[6]在1966年提出,基本确定了现在反式行星滚柱丝杠副的基本结构,由螺母旋转驱动丝杠直线运动,适合将伺服电动机与螺母直接集成,实现紧凑、高效的高动态驱动方案,这也是反向式行星滚柱丝杠副在人形机器人关节驱动中备受青睐的根本原因。
反向式行星滚柱丝杠副与标准式行星滚柱丝杠副结构类似,包含丝杆、螺母、滚柱及弹性挡圈,反向式行星滚柱丝杠副如图2所示。不同之处是反向式行星滚柱丝杠副丝杆上有齿轮,其功能与标准式行星滚柱丝杠副内齿圈相同。反向式行星滚柱丝杠副与标准式行星滚柱丝杠副工作原理相似,但反向式行星滚柱丝杠副是螺母作为主动件进行旋转运动,滚柱作为滚动体通过螺纹啮合将螺母的旋转运动转化为丝杆的直线运动[7],滚柱既围绕着丝杆做公转运动,又绕自身轴线做自转运动。该结构通过螺纹传动实现运动转换和载荷传递,通过齿轮连接保证行星滚柱在公转的同时进行正确的自转,并维持整个系统的同步循环运动。目前大多数厂家均采用这种构型。
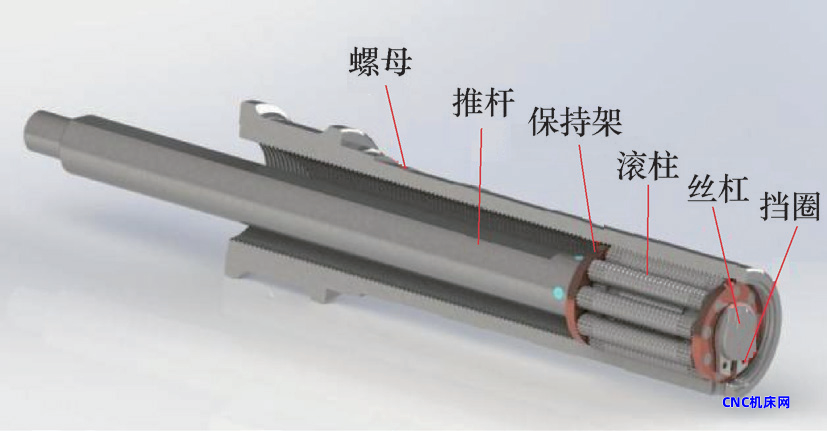
图2 反向式行星滚柱丝杠副
相较于传统反向式行星滚柱丝杠副齿轮的加工难度高、精度保持性差以及运行过程中摩擦磨损严重的问题,逐渐出现了新结构。江苏润孚动力[8]取消了丝杆齿轮/环槽及滚柱齿轮/环槽结构,设计笼形保持架,彻底消除复合结构加工瓶颈,在保障滚柱轴向平行度与恒导程特性的同时,显著降低振动噪声,实现高精度、规模化量产。无齿反式行星滚柱丝杠副如图3所示。
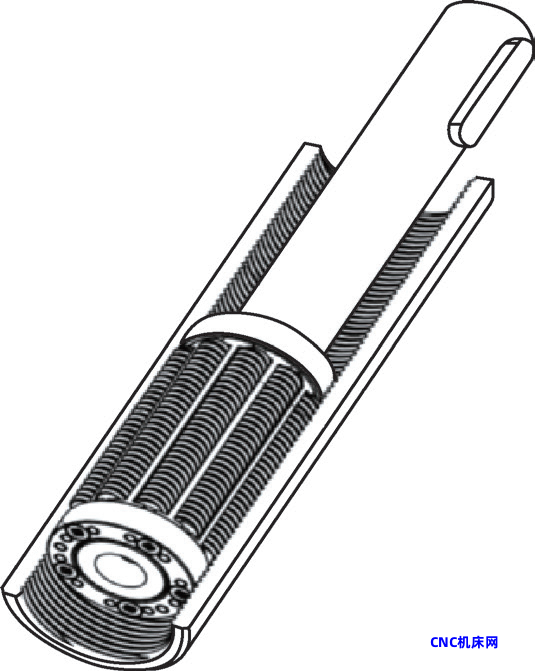
图3 无齿反式行星滚柱丝杠副
对于人形机器人灵巧手中用的微型丝杠,四川航天烽火伺服控制技术有限公司[9]设计了一款反向差动式行星滚柱丝杠副(见图4),采用两段不同螺纹,一段螺纹实现承载,另一段螺纹保证运动稳定,具备极高的定位精度和分辨率,在紧凑空间内实现大推力。
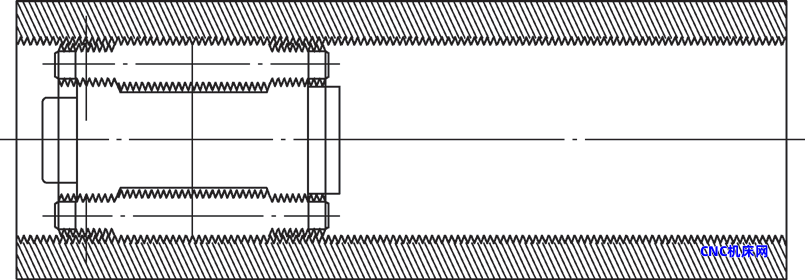
图4 反向差动式行星滚柱丝杠副
2.2 反向式滚珠丝杠副
反向式滚珠丝杠副由丝杠、螺母、反向器和滚珠构成,属于内循环式滚珠丝杠。不同于一般内循环式滚珠丝杠,反向式滚珠丝杠是螺母旋转丝杠移动,反向器安装在丝杠上面,通过滚珠承载。丝杠上的螺纹与螺母的螺纹相配合,滚珠则置于两者之间,当螺母旋转时,滚珠被推动沿着螺母的内螺纹线滚动,从而使丝杠进行直线运动,滚珠有效减小了摩擦,大大提高了传动效率,较反向式行星滚柱丝杠副传动效率高10%左右,对于作直线作动器的传动部件具有一定优势。
目前采用反向式滚珠丝杠副的直线关节产品较少,因为反向式滚珠丝杠副的反向器安装在丝杠上面,设计难度和加工难度大大上升。连云港斯克斯机器人科技有限公司[10]设计的一体式反向滚珠丝杠副如图5所示。丝杠在相邻两外螺旋滚道之间设置有向中心凹陷的回珠通道,回珠通道与外螺旋滚道形成一体式循环滚道,使得丝杠副整体结构紧凑、运行流畅,滚珠丝杠和滚珠螺母的均匀性和一致性更好,同时提高了滚珠丝杠副的可靠性和运行平稳性,降低了丝杠副高速运转时的噪声和振动现象。除了反向器和丝杠一体化设计外,还有插片式的反向式滚珠丝杠。该种构型降低了生产成本和加工难度,但丝杠轴中间空出一段用于安装反向器,会导致丝杠轴的刚度、强度大大降低。
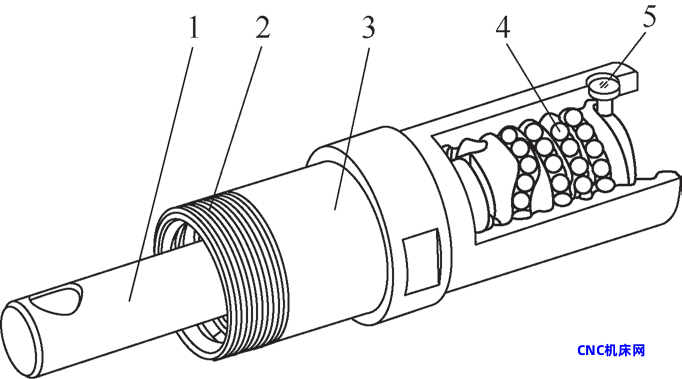
图5 一体式反向滚珠丝杠副
1—滚珠丝杠 2—螺母 3—弹性圆柱销 4—止口螺钉 5—滚珠
 PART 3
PART 3
反向式丝杠副性能的现状
3.1 承载性能
行星滚柱丝杠副(PRSM)的承载特性是其核心性能指标,直接决定了传动系统的精度、刚度与寿命。承载特性研究主要涵盖螺纹牙载荷分布规律、系统刚度建模与额定静载荷计算3大关键问题。近年来,通过解析、数值与试验,围绕误差、结构参数与工况对承载特性的影响机理展开了深入探索。
现有对反向式行星滚柱丝杠副螺纹牙载荷分布的研究,揭示其螺纹牙载荷分布不均的主要影响因素是误差、结构参数和动态工况。杜兴[11]与张文杰[12]聚焦于螺距误差,发现单个螺纹牙的负误差会使其接触力显著降低,而整体误差的增大会导致载荷分布曲线剧烈波动。刘靖楠[13]进一步系统研究了6类加工误差,明确指出中径误差、螺距误差与螺母外径误差对载荷分布影响最为显著,为关键公差的制定提供了理论依据。刘柱[14]发现装配误差是导致个别滚柱空载的直接原因,严重削弱系统整体承载能力。F U等[15]则开创性地建立了多滚柱弹簧系统模型,通过刚度与邻接矩阵求解复杂装配状态下的载荷分配,将承载特性分析提升至系统层级。乔冠等[16]分析了IPRSM中的主要热源类型,建立了有限元分析模型,考虑了环境温度、内部螺纹牙摩擦生热及电动机温度对其载荷分布的影响,并分析了在不同环境温度、电动机温度、长螺母转速及载荷下的IPRSM载荷分布情况。冯卫东等[17]建立了基于RecurDyn软件的反向式行星滚柱丝杠副动力学模型,在验证模型有效性的基础上,定量分析了螺母转速与丝杠负载对其传动特性的影响规律。李志斌等[18]建立了反向式行星滚柱丝杠副动力学模型,发现负载突变会导致转速下降与接触力波动,并通过PID控制验证增大比例系数可有效抑制转速跌落。
在研究误差影响的基础上,优化结构参数能够主动改善行星滚柱丝杠副承载特性。岳琳琳[19]通过参数化分析发现,90°牙型角能带来更优的承载性能,而滚柱数量的增加需与系统刚度进行权衡。ZHANG等[20]通过重新设计螺纹接触参数,从啮合原理层面提出了改善载荷分布不均的创新性设计方法。目前,承载特性研究正从静态分析走向动态响应。DU[21]等突破了静态模型的局限,建立了考虑表面波纹度的时变接触模型,揭示了在动态运行中接触力与轴向间隙的周期性波动规律,为PRSM的动态承载设计与寿命预测奠定了基础。韦锦程[22]对反向式组合曲线行星滚柱丝杠,完成了奇数次幂函数组合曲线螺纹牙廓的建模、啮合特性分析、载荷分布与接触应力计算,并通过有限元与动力学仿真验证了模型。
刚度是丝杠副承载性能的核心表现,现有研究通过建立丝杠副刚度模型分析其承载性能。刘子博等[23]针对轻载与重载/过载不同阶段,分别建立了考虑载荷不均和引入加工精度系数的轴向静刚度模型,显著提升了在不同承载区间内的模型精度,并总结出了与该模型适配的丝杠副额定载荷计算公式。GUO[24]等基于赫兹接触理论,创新地将螺纹牙视为环形板来计算其变形,建立了高精度的轴向刚度模型(实验误差仅6.41%),并系统分析了接触角、轴向载荷与滚柱数量对刚度的耦合影响规律。XING等[25]同样提出了专用的接触刚度计算模型,并强调了螺纹副制造精度对轴向游隙与刚度的决定性作用。为追求模型保真度,更复杂的机械变形被纳入考量。DAIDIE等[26]等首次在负载与刚度模型中引入了滚柱的弯曲变形,揭示了此前被忽略的由弯曲变形引起的附加载荷不均现象。马尚君等[27]则建立了综合考虑螺纹牙弹性变形与几何误差的承载分布模型,并通过与直接刚度法对比验证了其正确性。程远[28]利用赫兹接触理论与有限元分析,明确了PRSM在递增载荷下接触应力的非线性增长规律。吴林萍等[29]指出,螺纹的弹性变形会改变接触点位置,从而影响接触应力分布。刘柱等[30]则综合指出,滚柱弯曲变形与螺纹误差是加剧接触应力集中、降低部件疲劳寿命的主要因素。
综上所述,尽管已在误差影响、模型构建与参数优化方面取得了研究结果,但对多误差耦合作用机理、动态工况下的承载特性演化规律以及反向式PRSM等特殊结构的针对性研究较少,需要进一步升入探究其承载性能及优化技术。
3.2 传动效率
(1)反向式行星滚柱丝杠副 在行星滚柱丝杠副(PRSM)传动效率方面,目前从理论建模与试验验证两个维度展开了系统探索。
1)在理论建模方面,呈现出从静态分析向动态特性、从单一因素向多因素耦合的发展趋势。马尚君等[31]从摩擦机理入手,系统分析了接触角、螺旋升角和滚柱牙数对摩擦力矩的影响规律,建立了相应的传动效率计算模型,后续进一步考虑了摩擦热效应,深入分析了摩擦热与丝杠副工况、接触角和滚柱螺纹螺旋角之间的内在关联,推动了模型的完善。付永领等[32]则专注于建立PRSM的摩擦力矩模型,重点揭示了负载对摩擦力矩的影响规律。XIE等[33]基于拉格朗日方法建立了系统的动力学模型,突破了静态分析的局限,揭示了负载和丝杠角加速度对机构动态摩擦力矩、瞬态传动效率和综合传动效率的复杂影响规律。
2)在试验验证方面,多个团队开发了不同的传动效率测试平台。李凯等[34]设计了采用旋转电动机驱动和磁粉制动器加载的试验台,通过测量轴向负载、输入力矩等参数计算传动效率。然而,该平台受限于被动加载方式,无法测试逆传动效率,且输入力矩包含系统摩擦误差。刘柱等[35]研制了采用液压伺服加载的立式试验台,通过应变片和转矩传感器直接测量关键参数,但其液压系统存在安全隐患,立式结构限制样件长度,同样无法实现逆传动测试。徐子杰[36]对滚珠丝杠副和行星滚柱丝杠副进行了多工况效率测试,通过试验数据与新模型、传统模型的对比分析,验证了新模型的有效性,并总结了不同工况下传动效率的变化规律。
当前,PRSM传动效率研究已形成相对完善的理论与试验体系,但在动态特性建模、多物理场耦合分析以及试验测试的精度与范围方面仍需进一步深化,特别是在逆传动效率测试、长尺寸样件测试等方面存在明显的研究空白。未来的研究需要在测试方法创新和复杂工况下的效率特性分析等方面取得突破。
(2)反向式滚珠丝杠副 现在对于反向式滚珠丝杠副的研究刚刚起步,主要针对内循环式滚珠丝杠副的传动效率方面。滚珠丝杠副(BSM)的传动效率是其核心性能指标,直接影响整个传动系统的能耗、发热、动态响应与精度保持性。当前主要围绕以下4个维度展开系统性的深入探索。
1)在理论基础与参数优化建模方面,从寻求封闭解发展为运用全局敏感性分析进行系统优化。LIN等[37]构建了从准静态到动态的理论框架,其推导出的封闭形式效率公式,首次在理论层面揭示了效率与承载能力对接触角、螺旋角等几何参数的需求存在内在矛盾。在此基础上,芮执元等[38]面向高速高精应用,结合赫兹接触理论与静力分析,建立了同时考虑螺旋升角影响的轴向弹性变形模型,并构建了涵盖滑动与滚动摩擦的综合效率模型。结果表明,增大螺旋角不仅能提升传动效率,还能降低接触压力与轴向变形,从而兼顾系统刚度与定位精度。为进一步厘清多重耦合参数的影响,程强等[39]引入Morris全局敏感性分析法,量化了各参数对效率影响的重要度排序:当量摩擦系数>轴向力>导程>预紧力,并明确了低当量摩擦系数配合适中预紧力与导程是实现高效传动的优化路径。
2)摩擦机理与磨损演化规律是实现BSM全寿命周期高效运行的前瞻性保障。ZHOU等[40]通过扩展Archard磨损模型与长时耐久试验,揭示了BSM磨损分为跑合与稳定两个阶段,并将预紧力衰退与磨损过程关联,为理解效率的时变衰减提供了机理模型。潘承莹等[41]进一步建立了综合接触角、螺旋角及磨损量的时变摩擦力矩模型,发现转速越高,磨损及效率衰减越快,并提出摩擦力矩可作为评估效率衰退的灵敏指标。HEYDARNIA等[42]则从系统动力学视角,创建了包含磨损、预紧力损失等故障的界面刚度模型,量化了磨损→接触刚度衰减→系统固有频率下降的因果链,为通过振动信号在线监测效率稳定性开辟了新途径。
3)载荷条件、预紧机制与高速运行特性是决定BSM在实际工况下效率表现的关键。WEI等[43]针对单螺母变导程预紧结构的研究发现,在高速工况(转速≥2000 r/min)下,离心力与陀螺力矩会显著改变滚珠与滚道间的接触载荷,导致传动效率随轴向载荷增加而提升,并在外载荷与预紧力达到平衡时出现效率突变现象。王建修等[44]通过正交试验证实,滚道适应比存在最佳范围(0.52~0.55),且效率随预紧力矩增大而提高,但过大的预紧力将加剧磨损并导致效率长期衰退。OH等[45]针对双螺母预紧结构,开发了可分离滑动摩擦与黏性摩擦的实用摩擦力矩模型,并提出将预紧力设置为大于最大轴向载荷35.4%的设计准则,以抑制摩擦力矩波动。潘承莹等[46]则批判性地指出,传统斜面模型在低负载下会严重高估效率,他们通过集成赫兹接触与载荷非均匀分布的精确模型,证实轴向负载是影响效率最核心的工况因素。
4)制造误差、润滑与工况的耦合效应是连接理想模型与实际应用的关键环节。祖莉等[47]首次量化了导程误差与摩擦力矩间的线性正相关关系,建立了误差→载荷分布不均→接触角变化→摩擦力矩增大→效率下降的完整分析逻辑。KUO等[48]融合LuGre动态摩擦模型与黏度-温度公式,揭示了效率在低速区随速度提升(润滑状态改善)、在高速区随速度下降(黏性摩擦主导)的规律。冯虎田等[49]则借助Stribeck曲线,系统阐释了负载、转速与润滑黏度的耦合机理。ZHANG[50]通过建立动态摩擦系数模型并绘制Stribeck曲线,精准定位了对应最高效率的最小摩擦系数工况点。张敏华等[51]进一步整合工艺误差与弹流润滑(EHL)理论,发现润滑黏度选择存在随负载变化的交错点:低速区高黏度油利于成膜,高速区低粘度油可减阻。
综上所述,滚珠丝杠副传动效率的研究已发展为涵盖参数优化、摩擦磨损、载荷预紧以及误差润滑等多物理场耦合的系统性分析体系。学界共识认为,当量摩擦系数是影响效率最敏感的参量,需通过优化结构参数、精确控制预紧力、主动匹配润滑状态与管理制造误差来协同提升效率。
 PART 4
PART 4
未来发展趋势
4.1 结构设计与模型搭建
对于反向式行星滚柱丝杠副而言,需要优化滚柱与螺纹的接触设计,进行螺纹牙修形,以求能够减少摩擦损耗,提升传动效率。对于反向式滚珠丝杠副而言,需要对丝杠副上面的回珠曲线进行改进设计,对实际传动过程中的受力与运动状态进行分析,筛选出有效可行的曲线空间,保证滚珠丝杠副的可靠性和运行平稳性。对丝杠副进行可靠性和高精度保持性设计,一方面进行寿命试验,另一方面建立基于物理的疲劳寿命预测模型,考虑摩擦磨损与润滑条件,能够对丝杠副进行寿命预测和健康分析。
建立多元误差耦合的传动模型,结合直线关节在实际工况下的加工误差、装配误差、热变形以及磁性条件,进行建模分析,考虑摩擦磨损带来的热变形与电动机工作过程中产生的热变形的叠加。利用机器学习算法分析振动、温度等历史数据,识别性能衰退的早期特征,实现对丝杠副的状态分析与规划维护。
4.2 性能分析与试验装备
承载特性和传动特性是人形机器人实际工况下(短时高承载)行星滚柱丝杠工作过程中的重要特性。需要研究反向式丝杠副在高速运转条件下的运转平稳性、重复定位精度、热效应以及振动特性。丝杠在高速运行过程中,可能会由于摩擦、温度上升或部件间不平衡引起机械失效或效率降低。同时电动机包裹螺母,会将电动机发热直接传递给丝杠副,需要结合不同热源叠合的物理模型,分析在运行过程中的热变形对传动性能的影响。在不同速率下进行试验,评估在不同转速下的丝杠服役性能,确定其运转的临界转速和允许的长时间服役范围。现有的丝杠副检测设备主要基于标准式丝杠副设计的,但反式丝杠副不同于标准式丝杠,其螺母旋转丝杠移动的特殊传动形式,需要引入顶尖对中偏差和附加弯矩,导致测量值严重偏离真实效率,难以获得可靠的试验数据。因此,需要设计新的传动效率、行程误差和摩擦力矩试验台适用反式丝杠副的特殊构型与运动形式进行试验。
4.3 加工工艺
目前,反向式丝杠副的加工工艺主要是螺纹磨削,该过程加工难度大、精度要求高且一致性要求高,尤其是反式丝杠副长螺母的内螺纹磨削。目前主要在高精数控螺纹磨床进行加工,需要达到微米级甚至亚微米级的精度。
1)磨削过程中的刀具刚性不足、工件散热不均匀以及床身振动等问题尤为突出。因此,需要开发新型磨削单元和内螺纹磨床设备,通过优化砂轮结构、改进冷却系统、提升机床动态稳定性和整体刚度等措施,解决反式丝杠副长螺母大长径比内螺纹的高精度磨削难题。
2)丝杠副螺纹的表面质量需要进一步优化。良好的表面质量能够有效降低螺纹牙接触区域的摩擦阻力,减少因摩擦引起的能量损失和热量积累,从而显著延长丝杠副的服役寿命,并有助于减少磨损与降噪。可以通过优化表面热处理工艺以及采用激光打磨等先进技术,改善核心部件的表面粗糙度和波纹度,进一步提升丝杠副的动态性能与耐磨性。
3)为提升整体加工过程的一致性与可靠性,严格控制工艺误差。加工过程中的热变形、机械振动、刀具磨损及工艺参数微调偏差等主要误差源,若得不到有效抑制,将直接影响丝杠、滚柱和螺母的中径一致性及螺纹牙型角精度。通过集成实时温度补偿、振动传感器网络与在线尺寸测量系统等机床监控手段,可实现对误差的快速识别与修正,从而显著增强工艺稳定性与可控性。
 PART 5
PART 5
结束语
随着人形机器人与具身智能应用场景的不断开发和运用,反向式丝杠副作为直线关节的核心传动部件越来越受人们关注。基于实际应用场景下人形机器人直线关节的性能需求,目前针对反向是丝杠副的承载特性和传动效率的研究不断深入,旨在实现工艺优化与性能提升。人形机器人直线关节用反式丝杠副,要求具有高承载能力、高刚性、高重复定位精度、高精度保持性和高传动效率等性能。设计与建模上,需进行螺纹修形与优化传动模型,建立融合多元误差耦合的传动模型,能够利用机器学习实现丝杠副状态预测与维护。性能提升上,需重点研究其在高速、高载工况下下的热变形与振动特性,并针对其长螺母螺母的特殊结构开发丝杠副专用试验台,以准确评估其服役性能,同时还需要研究其正逆传动的特性,为后续机器人实现跳跃缓冲做准备。加工工艺上,核心在于反向式丝杠副长螺母的大长径比内螺纹磨削,需要开发新型磨床,具备实时监控系统来攻克精度、表面质量与误差控制难题,从而保证批量生产的一致性与可靠性。对于同种工况下,对行星滚柱丝杠副与滚珠丝杠副做出差异比较与性能研究,找到每种对应工况的最佳传动方案。反向式丝杠副对人形机器人直线关节的性能提升非常重要,提高反向式丝杠副的可靠性和精度保持性,为其在直线执行器中发挥更大作用。
[1] 陈士云. 行星滚柱丝杠副螺纹接触参数研究与接触状况分析[D]. 南京:南京理工大学,2019.
[2] 南京理工大学. 一种“电机-螺母-轴承”一体化设计的直线关节:CN202411878033.6[P]. 2025-02-18.
[3] CHENG Z,ZU L,ZHOU C. Review on errors and transmission characteristics of the planetary roller screw mechanism[J]. Proceedings of the Institution of Mechanical Engineers,Part C:Jou rnal o f Mechanical Engineering Science,2024,238(12):5994-6006.
[4] 郑伟. 精密行星滚柱丝杠副工艺制造与传动性能研究[D]. 南京:南京理工大学,2021.
[5] SHANG JUN M,WEI C,LINPING W,et al. Modelling of transmission accuracy of a planetary roller screw mechanism considering errors and elastic deformations[J]. Mechanism and Machine Theory,2019,134:151-168.
[6] STRANDGREN C B. Screw-threaded mechanism:US2683379A[P]. 1954-07-13.
[7] 马尚君,刘更,佟瑞庭,等. 考虑滚柱节圆偏移的反向式行星滚柱丝杠副运动学分析[J]. 中国机械工程,2014,25(11):1421-1426.
[8] 江苏润孚动力科技有限公司. 一种标准型无齿行星滚柱丝杠:CN202510799230.7[P]. 2025-08-26.
[9] 四川航天烽火伺服控制技术有限公司. 一种反向差动式行星滚柱丝杠均载优化设计方法 :CN202411664812.6[P]. 2025-03-11.
[10] 连云港斯克斯机器人科技有限公司. 一种“双曲正切与代数正弦”耦合的螺母驱动型滚珠丝杠副:CN202510723476.6[P]. 2025-07-22.
[11] 杜兴. 行星滚柱丝杠承载与摩擦特性研究[D]. 重庆:重庆大学,2021.
[12] 张文杰. 行星滚柱丝杠副螺纹牙载荷分布计算模型与方法[D]. 西安:西北工业大学,2017.
[13] 刘靖楠. 考虑误差影响的行星滚柱丝杠副啮合与接触特性分析与研究[D]. 南京:南京理工大学,2020.
[14] 刘柱. 标准型行星滚柱丝杠副载荷分布及动态特性分析与研究[D]. 南京:南京理工大学,2019.
[15] F U X J,LI X,MA S J,et al. A multiroller static model of the planetary roller screw mechanism considering load sharing[J]. Tribology International,2022:173.
[16] 乔冠,刘付乐,郝志鹏,等. 人形机器人一体化关节用执行机构的载荷分布[J]. 机械设计,2025,42(8):105-112.
[17] 冯卫东,王世松,邓星桥,等. 反向式行星滚柱丝杠副的动力学建模及传动特性研究[J]. 机械传动,2025,49(11):35-41+56.
[18] 李志斌,赵永强,郭腾,等. 反向式行星滚柱丝杠副变载荷运动特性分析[J]. 机电工程技术,2025,11(21):1-10.
[19] 岳琳琳. 行星滚柱丝杠机构运动仿真及承载特性研究[D]. 南京:南京航空航天大学,2014.
[20] Z H A N G W,LIU G,TONG R,et al. L o a d distribution of planetary roller screw mechanism and its improvement approach[J]. Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science,2016,230(18):3304-3318.
[21] D U X,WU L Y,MIAO J C,et al. Timevarying contact characteristics of the planetary roller screw mechanism considering nonuniform surface waviness[J]. Tribology International,2023,187:21.
[22] 韦锦程.反向式组合曲线行星滚柱丝杠传动特性研究[D]. 重庆:重庆大学,2024.
[23] 刘子博,邓攀,祖莉,等. 不同承载阶段行星滚柱丝杠副的变形研究[J]. 组合机床与自动化加工技术,2022(6):188-192.
[24] G U O J N,PENG H,HUANG H Y,e t a l. Analytical and experimental of planetary roller screw axial stiffness[J]. 2017 IEEE International Conference on Mechatronics and Automation (ICMA),2017:752-757.
[25] XING M C,LIU S,CHENG Z W,et al. Multirollers statics analysis of planetary roller screw mec ha ni sm base d o n e x plicit e x p re s si o n[J]. Tribology International,2024,197:109818.
[26] DAIDIE A,ABEVI F,CHAUSSUMIER M,et al. Static Analysis of an Inverted Planetary Roller Screw Mechanism[J]. Journal of Mechanisms and Robotics,2016,8(4):041020.
[27] 马尚君,刘更,付晓军,等. 考虑误差的行星滚柱丝杠副滚柱承载分布[J]. 哈尔滨工业大学学报,2015,47(7):98-102.
[28] 程远. 行星滚柱丝杠副啮合运动与接触特性理论分析与研究[D]. 南京:南京理工大学,2018.
[29] 吴林萍,马尚君,许千斤,等. 考虑弹性变形的行星滚柱丝杠接触特性[J]. 机械工程学报,2024,60(5):130-141.
[30] 刘柱,范元勋. 考虑装配误差的行星滚柱丝杠副载荷分析与研究[J]. 机械制造与自动化,2020,49(6):120-123.
[31] 马尚君,刘更,佟瑞庭. 行星滚柱丝杠副摩擦力矩及传动效率研究[J]. 哈尔滨工业大学学报,2013,45(11):74-79.
[32] 付永领,甘发金,祁晓野,等. 行星滚柱丝杠副负载对摩擦力矩的影响[J]. 机械传动,2016,40(5):116-119.
[33] X IE Z J,XUE Q H,WU J Q,et al. Mixedlubrication analysis of planetary roller screw[J]. Tribology International,2019,140:9.
[34] 李凯,叶佩青,周晓尧,徐强. 精密行星滚柱丝杠的传动特性[J]. 光学精密工程,2016,24(8):1908-1916.
[35] 刘柱,范元勋. 行星滚柱丝杠传动效率试验台设计[J]. 组合机床与自动化加工技术,2019,000(12):108-110
[36] 徐子杰. 精密滚珠(柱)丝杠副的承载与传动效率研究[D]. 南京:南京理工大学,2021.
[37] L I N M C,RAVANI B,V E L I N S K Y S A . Kinematics of the Ball Screw Mechanism[J]. Journal of Mechanical Design,1994,116(3):849-855.
[38] 芮执元,韩新健,郭俊锋. 螺旋升角对滚珠丝杠副弹性变形及传递效率的影响[J]. 机械设计,2011,28(11):39-42+60.
[39] 程强,崔磊鑫,张涛,等. 基于Morris法的滚珠丝杠副传动效率多因素分析[J]. 组合机床与自动化加工技术,2023(6):128-131.
[40] ZHOU C G,ZHOU H X,FENG H T. Experimental analysis of the wear coefficient of double-nut ball screws[J]. Wear,2020,446-447:203201.
[41] 潘承莹,祖莉,周长光,等. 基于滚珠丝杠副滚道磨损的摩擦力矩计算与试验[J]. 振动与冲击,2021,40(24):212-220.
[42] HEYDARNIA H,ALTINTAS Y. Modeling of Ball Screw-Nut Interface Stiffness With Wear (Ball Screw Wear Dynamics)[J]. Journal of Manufacturing Science and Engineering,2025,147(2):021005.
[43] WE I C C,LAI R S. Kinematical analyses and transmission efficiency of a preloaded ball screw operating at high rotational speeds[J]. Mechanism & Machine Theory,2011,46(7):880-898.
[44] 王建修,任选峰,柴彦平. 基于滚珠丝杠副设计参数对效率的影响分析[J]. 精密制造与自动化,2020(4):20-21.
[45] OH K J,CAO L,Chung S C. Explicit modeling and investigation of friction torques in double-nut ball screws for the precision design of ball screw feed drives[J]. Elsevier,2020,141:105841.
[46] 潘承莹,祖莉. 不同负载工况下双螺母滚珠丝杠副动态传动效率的试验研究[J]. 仪器仪表学报,2021,42(1):99-107.
[47] 祖莉,林炜国,张鲁超,等. 双螺母滚珠丝杠副导程误差与摩擦力矩关系研究[J]. 农业机械学报,2021,52(6):397-406.
[48] KUO T C,HWANG Y C,HSIEH W H. A New Correlation Equation for Calculating the Frictional Torque of the Nut at Different Feed Velocities and Nut Temperatures[J]. International Journal of Precision Engineering and Manufacturing,2021,22(3):41.
[49] 冯虎田,祖莉,徐子杰. 滚珠丝杠副传动效率影响因素试验研究[J]. 金属加工(冷加工),2022(2):7-10.
[50] ZHANG L C,ZHOU C G. Experimental study on the coefficient of friction of the ball screw[J]. Journal of Tribology,2021:1-18.
[51] 张敏华,祖莉,徐子杰. 滚珠丝杠副传动效率的模型建立及试验研究[J]. 仪器仪表学报,2023,44(2):175-183.